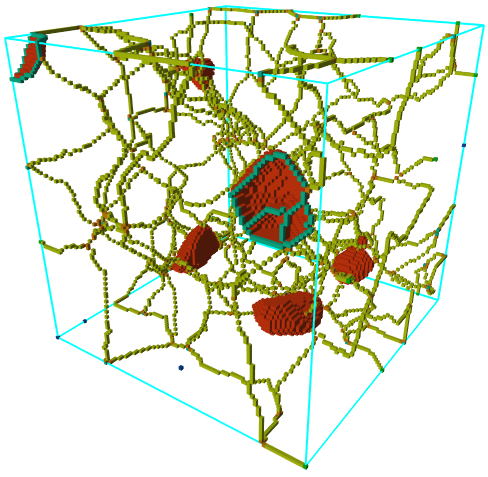
Illustration of the classification using the Draw_Cubes module and a color code for the pixel types (with the colormap tensteps.col). Dark blue means isolated, orange means curve junctions, red are surfaces, etc.
t | t' | n | Type | Output value |
|---|---|---|---|---|
| * | 0 | * | Interior | 2 |
| 0 | 1 | * | Isolated | 3 |
| 1 | 1 | 1 | Curve end | 4 |
| 1 | 1 | >1 | Border point | 5 |
| 2 | 1 | 2 | Curve | 6 |
| >1 | 1 | >2 | Curve junction | 7 |
| * | >1 | * | Surface or surface junction | 8 |